Artikel
Beobachtungsberichte
Equipment
Literatur

Objektliste
Links
Das bin ich
Impressum
|
Home Artikel Beobachtungsberichte Equipment Literatur |
|
Projekte Objektliste Links Das bin ich Impressum |
Vorab gesagt, das hier ist eine theoretische Überlegung. Ich bin nicht ausgerüstet, um einen praktischen Test durchzuführen.
Die Astrofotografie ist eine komplexe Angelegenheit, bei der viele Details sauber arbeiten müssen, damit das Gesamtergebnis befriedigend wird. Eine dieser Stellschrauben ist die korrekte Nachführung, die einige Tücken aufweist. Trotz größter Anstrengungen der Hersteller, die Mechanik so perfekt wie möglich herzustellen, sind einige Fertigungstoleranzen enthalten, die das Gesamtergebnis negativ beeinflussen. Solche Toleranzen bewirken, das das Objekt während der langen Belichtungszeit nicht exakt an der gleichen Stelle auf dem Chip der Kamera abgebildet wird. Es entstehen Verschmierungen an den feinen Objektdetails oder aus den punktförmigen Sternen kleine Strichspuren.
Um solche Fertigungstoleranzen und damit die Auswirkung auf das Foto in den Griff zu bekommen, gibt es mehrere sinnvolle Möglichkeiten. Die einfachste Möglichkeit ist wohl, die Brennweite der Fotografie so weit zu reduzieren, das diese Auswirkungen keinen Einfluss mehr haben. Damit werden aber gleichzeitig die möglichen/erreichbaren Ziele geändert. Es lassen sich so bestimmt tolle Übersichtsaufnahmen mit großen Objekten erzeugen, aber eben keine detailreiche Aufnahmen von kleinen Fitzelchen.
Eine weitere, aber sehr aufwendige Möglichkeit ist die Benutzung eines Leitrohrs. Dabei wird mit einem zweiten, parallel mitmontierten Teleskop ein Stern angepeilt und über eine ausgeklügelte Steuerung/Regelung immer an der selben Stelle im Leitrohr gehalten. Das parallel fotografierende Teleskop hält so sein Zielobjekt auch ziemlich exakt immer an der gleichen Stelle. Die Fertigungstoleranzen der Mechanik werden großteils durch die geregelte Nachführung ausgeglichen. Nachteil ist natürlich das zweite Teleskop mit einer zweiten Kamera, welches auf der Montierung Platz finden muss.
Ein Mittelweg zum Ausgleichen der Fertigungstoleranzen der Rektaszensionsachse ist das sogenannte PEC (Periodic Error Correction), landläufig auch als Schneckenfehler bezeichnet. Ich möchte den Begriff Schneckenfehler aber vermeiden, da die Schnecke zwar einen großen Anteil an dem unrunden Lauf hat, aber nicht alleine dafür verantwortlich ist.
Der Antrieb sieht i.d.R. so aus, das ein Elektromotor über Zahnräder ein Schneckenrad antreibt, welches die Rektaszensions- oder die Deklinationsachse bewegt. Die Deklinationsachse bleibt weitesthegend konstant stehen und die Rektaszensionsachse muss ständig die (doch sehr konstante) Erddrehung ausgleichen. Da die Zahnräder und die Schnecke nicht 100%-ig gefertigt sind, also exakt gleichförmige Zähne hat, entstehen durch diesen Antrieb kleine Schwankungen im gleichmäßigen Lauf der angetriebenen Achse.
Da die Zahnräder und die Schnecke rund drehen und irgendwann eine komplette Umdrehung gemacht haben, wiederholen sich auch die durch Zahnräder und Schnecke verursachten Schwankungen im Antrieb in regelmäßigen Abständen, also periodisch. Weil diese Schwankungen periodisch sind, sollte es dann doch möglich sein, über diese Periode den Fehler zu bestimmen und eine Ausgleichsfunktion zu erstellen. Mit dieser Ausgleichfunktion könnte die Steruerung dann die Nachführung der Rektaszensionsachse gezielt so steuern, das die Schwankungen der Mechanik ausgeglichen werden.
Bei dem Nachführen mit einem Leitrohr wird ähnliches durchgeführt, nur das die Schwankungen nicht vorab bestimmt werden und in die Nachführung eingerechnet werden, sondern die Abweichungen werden online über den Leitstern mit der Guiding-Kamera bestimmt und direkt nachgeregelt.
Da die Schwankungen periodisch sind, sollte man mit Hilfe der Fourier-Analyse diese periodischen Anteile bestimmen können und daraus eine Ausgleichsfunktion ableiten können. Die Fourier-Analyse ist ein sehr mächtiges Werkzeug, dessen Einsatz ich hier mal zeigen und demonstrieren möchte.
Wenn eine Zahl von sich selbst abgezogen wird, so kommt immer Null heraus (vgl. 8-8=0; 237-237=0). Mit diesem Ansatz bestimme ich die Ausgleichsfunktion fPEC als direkte Abweichung der Schwankung fSchwankung von 0 (was ja direkt die Schwankung ist) und rechne zur Korrektur einfach mit der Ausgleichsfunktion fPEC, die direkt in die Nachführbefehle mit eingeht.
Vor einiger Zeit hatte ich mal von Anke eine Messung der Schwankung bekommen, mit der ich diese Idee vorführen möchte.
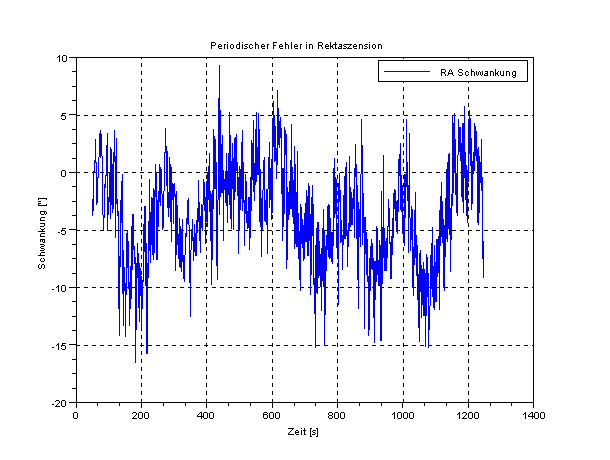
[Abbildung 1]
Diese Daten wurden im Juni 2009 mit einem 6" f/5 Teleskop (Krümel) auf einer Vixen GP Montierung aufgenommen. Die Aufnahmesoftware misst die Schwankung und erzeugt eine Textdatei mit den Daten (Zeit und Schwankung). Weiterhin ermittelt diese Software (indirekt) die Seeingqualität und gibt die Qualität für diese Messreihe mit FWHM=6,93" an, was recht groß ist. Daher hab ich diese Daten (mit einem gleitenden Mittelwert) etwas geglättet und es kommt folgende Kurve heraus:
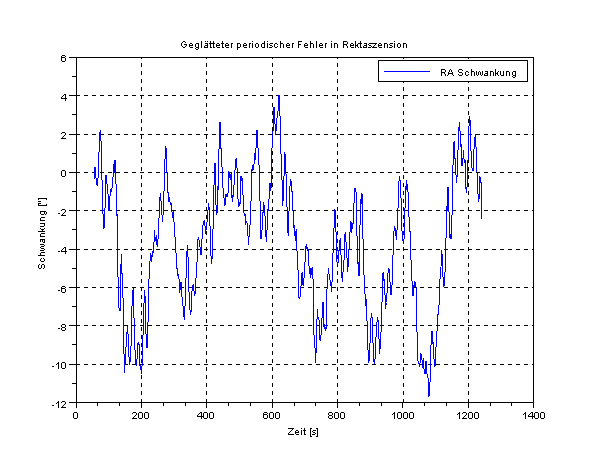
[Abbildung 2]
Man sieht deutlich die Schwankungen der Rektaszensions-Nachführung. Auch sind hierin nicht wirklich die Umdrehungen der Schnecke herauszulesen (ich sehe dies zumindest nicht auf anhieb). Es geht immer wieder auf und ab, tendenziell kann man höchstens einen Drift nach unten erkennen.
Die Montierung ist eine Vixen GP, die Rektaszensionsachse hat 144 Zähne. Diese Achse dreht an einem Tag einmal rund, das heißt ein Zahn dreht in 10 Minuten (24h/144) eins weiter. Der Sterntag hat aber nicht exakt 24 Stunden, sondern 23h 56m 4,099s (=86164.099 Sekunden). Und damit hat ein Weiterschieben eines Zahns etwa 9m 58,3618s Dauer (=598,3618 Sekunden). Und über diese Zeit (oder noch besser, ein Vielfaches dieser Zeit) wird eine Fourier-Analyse gemacht, damit man diese - ich sag mal - Grundschwingung immer komplett erfasst wird. Die Daten haben eine Gesamtlänge von etwa 1471 Sekunden, was heißt, das zwei komplette Grundschwingungen enthalten sind. Also werden genau diese zwei Grundschwingungen mit einer Zeit von 2x598,3618s ~ 1197s ausgeschnitten und damit weitergerechnet.
Das Ergebnis dieser mit ungeglätetten Werten berechneten Fourier-Analyse ist hier zu sehen. Hierbei werden auf der x-Achse die Ordnungen aufgetragen (1., 2., 3., ...) und auf der y-Achse die auf die größte Amplitude normierten Amplituden:
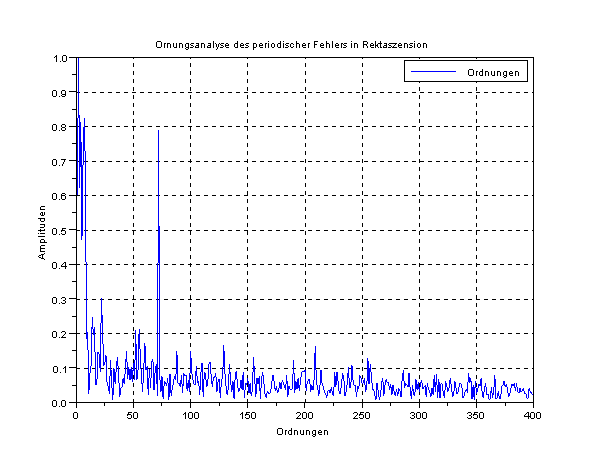
[Abbildung 3]
Im linken Bereich sind die niedrigen Ordnungen, also die langsamen Schwingungen. Diese bestimmen also hauptsächlich den periodischen Fehler (wegen der großen Amplituden). Markant ist aber auch der Ausschlag der Amplitude in der 72. Ordnung.
Hier mal ein vergrößerter Ausschnitt der Abbildung 3:
[Abbildung 3-1]
Da wir zwei Grundschwingungen haben, ist das ein periodisches Signal, welches 36 (=72/2) mal pro Grundschwingung Auftritt. Ich würde meinen Arsch drauf verwetten, das dies die Anzahl Zähne eines Zahnrades sind, welches die Schnecke antreibt.
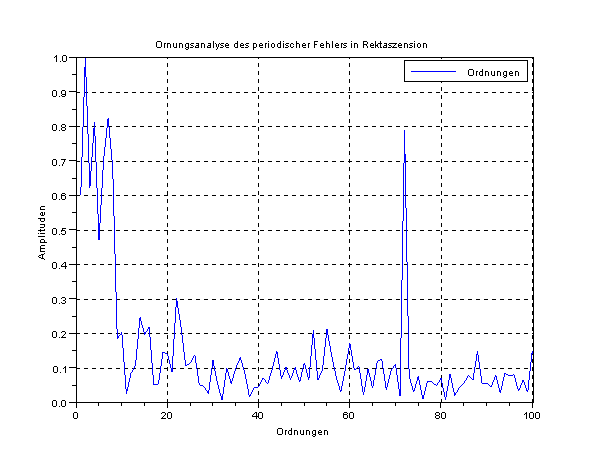
Da ich mit den geglätteten Daten rechnen will, hab ich natürlich auch diese Fourier-Zerlegung über die geglätteten Daten gemacht. Die sieht dann so aus:
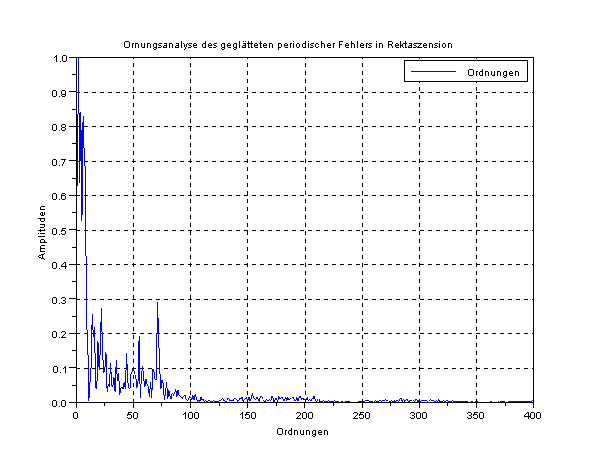
[Abbildung 4]
In den tiefen Frequenzen (also langsamen Schwingungen) ist das Verhalten ähnlich zu der ungeglätteten Analyse. Die Auswirkung der Glättung sind aber direkt in den höheren Frequenzen (schnellere Schwingungen) zu sehen. Da durch die Glättung im Prinzip ja die oberen Frequenzen abgeschnitten werden, gehen die Amplituden dort auch ziemlich schnell gegen Null, je höher man kommt. Schön sehen kann man das an dem Ausschlag bei der 72. Ordnung, derem Amplitude mit den ungeglätteten Daten bei etwa 0,8 liegt, bei den geglätteten Daten ist diese dann schon auf etwa 0,3 abgefallen. Unterhalb dieser Ordnung verhalten sich die Daten beider Analysen halbwegs ähnlich.
Die Glättung hab ich über 20 Werte gemacht (gleitender Mittelwert), die Werte sind mit einer Abtastung von 2 Werten pro Sekunde erfolgt, also wurde über 10 Sekunden geglättet. Bei einer Datenlänge von etwa 1200 Sekunden heißt das also, das Frequenzen mit einer Periode kürzer als 60 Sekunden (=1200s/10s/2) beschnitten wurden, also der hochfrequente Anteil herausgefiltert ist.
Mit den Analysedaten der Fourier-Zerlegung der geglätteten Daten setze ich nun die Ausgleichfunktion fPEC zusammen. Dies erfolgt einfach über die Cosinus-Summen. Damit nicht alle Ordnungen zur Rückwärtsrechnen herangezogen werden müssen, berücksichtige ich nur die Ordnungen, an denen die Amplitude einen Wert von mindestens 15% hat. Kleinere Amplituden haben ja auch einen immer geringeren Einfluss auf die Signalform, so das das Rückrechnen ohne größere Abweichungen mit den 15% als Schwelle funktionieren sollte.
Als Ergebnis erhalte ich also die Fourier-Koeffizienten der stärksten Ordnungen (2 Werte je Ordnung). Bei dieser Auswertung werden 20 Ordnungen, die größer als 15% sind, berücksichtigt. Man hat also insgesamt 40 Werte, die die Ausgleichsfunktion fPEC parametrisieren.
Die damit zusammengesetzte Ausgleichsfunktion fPEC hab ich dann mal in die Grafik der Schwankung der Rektaszensions-Achse reingelegt:
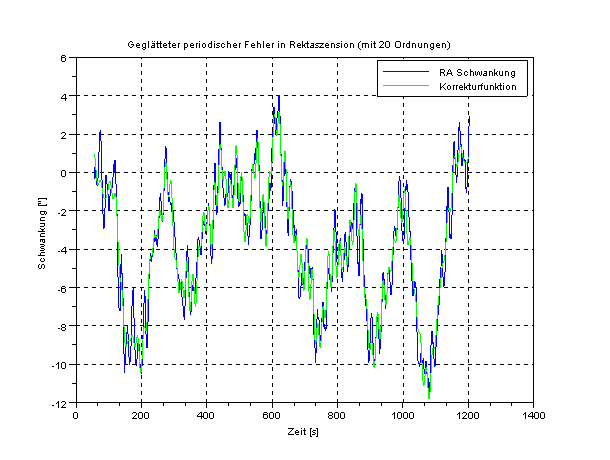
[Abbildung 5]
Man sieht, das die grüne Ausgleichsfunktion fPEC die blaue Schwankung fSchwankung recht gut annähert. Somit kann man auch ganz gut die zu erwartende Schwankung mit der Ausgleichsfunktion bestimmen. Wird die Steuerung mit dieser Ausgleichsfunktion korrigiert, dann ist die resultierende Schwankung die Differenz der Schwankung und der Ausgleichsfunktion.
Diese zu erwartende Schwankung ist im folgenden aufgetragen:
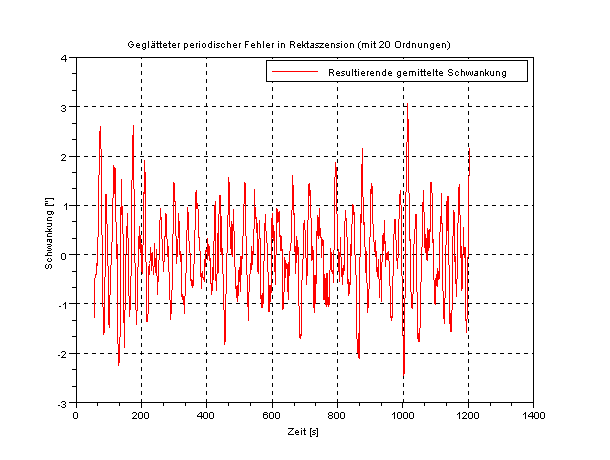
[Abbildung 6]
Die Schwankungen wurden also von ursprünglich grob +/-7" auf etwas unter +/-2" reduziert.
Den Vergleich dieser Auswirkung sieht man am besten, wenn die ursprüngliche Schwankung und die korrigierte Schwankung mit der Ausgleichsfunktion in einem Diagramm aufgetragen wird:
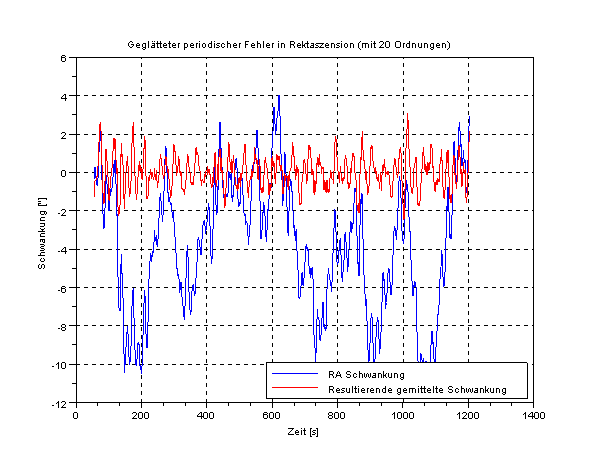
[Abbildung 7]
Den Vorteil dieser Bestimmung sehe ich darin, das über mehr als eine Schnecken-Periode eine Ausgleichsfunktion ermittelt wird, da die Daten eindeutig zeigen, das sich die Schwankung nicht alleine auf eine Schneckenumdrehung reduzieren läßt (bei einigen Steuerungen hab ich gelesen, das eine Periode hierzu hinterlegt wird). Optimal wäre natürlich eine Aufzeichnung der Daten über einen langen Zeitraum, da sich so mehrere Einflussfaktoren zeigen und sich somit auch berücksichtigen lassen.
Diese Korrektur kann auch nur erfolgen, wenn die genaue Position der Rektaszensions-Achse bekannt ist. Oder anders, die Korrekturen über die Ausgleichsfunktion fPEC müssen zum richtigen Zeitpunkt erfolgen, sonst bewirkt man u.U. genau das Gegenteil, nämlich eine Verschlechterung der Schwankung. Dies macht also nur Sinn, wenn die Montierung z.B. fest installiert ist oder über einen längeren Zeitraum fest stehen bleibt, da die Ermittlung der Ausgleichsfunktion sich nur auf die aktuelle Aufstellung bezieht und die Datenaufzeichnung auch eine Weile dauert.
Diese Betrachtungen sind, wie schon erwähnt, auf theoretischer Basis entstanden und konnten von mir nicht geprüft werden. Mir ging es um das Prinzip und das Zeigen einer konkreten Anwendung des Werkzeugs Fourier-Zerlegung. Hehe, ich bitte, dies mir nicht zur Last zu legen, falls es sich als als falsch herausstellt.
Optimierungen hierzu hab ich noch keine gemacht, evtl. läßt sich da noch einiges herausholen. Vieleicht findet sich auch der ein oder andere, der diese Idee mal in die Tat umsetzt...
Stand: 29. Dezember 2010